Le **caratteristiche meccaniche** della macchina permettono di analizzare le prestazioni della [[Macchina asincrona]], le condizioni di avviamento e la stabilità del punto di funzionamento a regime.
### Coppia Elettromagnetica
L'analisi delle prestazioni parte dal [[Circuito equivalente della macchina asincrona|circuito equivalente della macchina asincrona]] riportato allo statore.
Consideriamo il caso di [[Macchina asincrona|rotore avvolto]]:
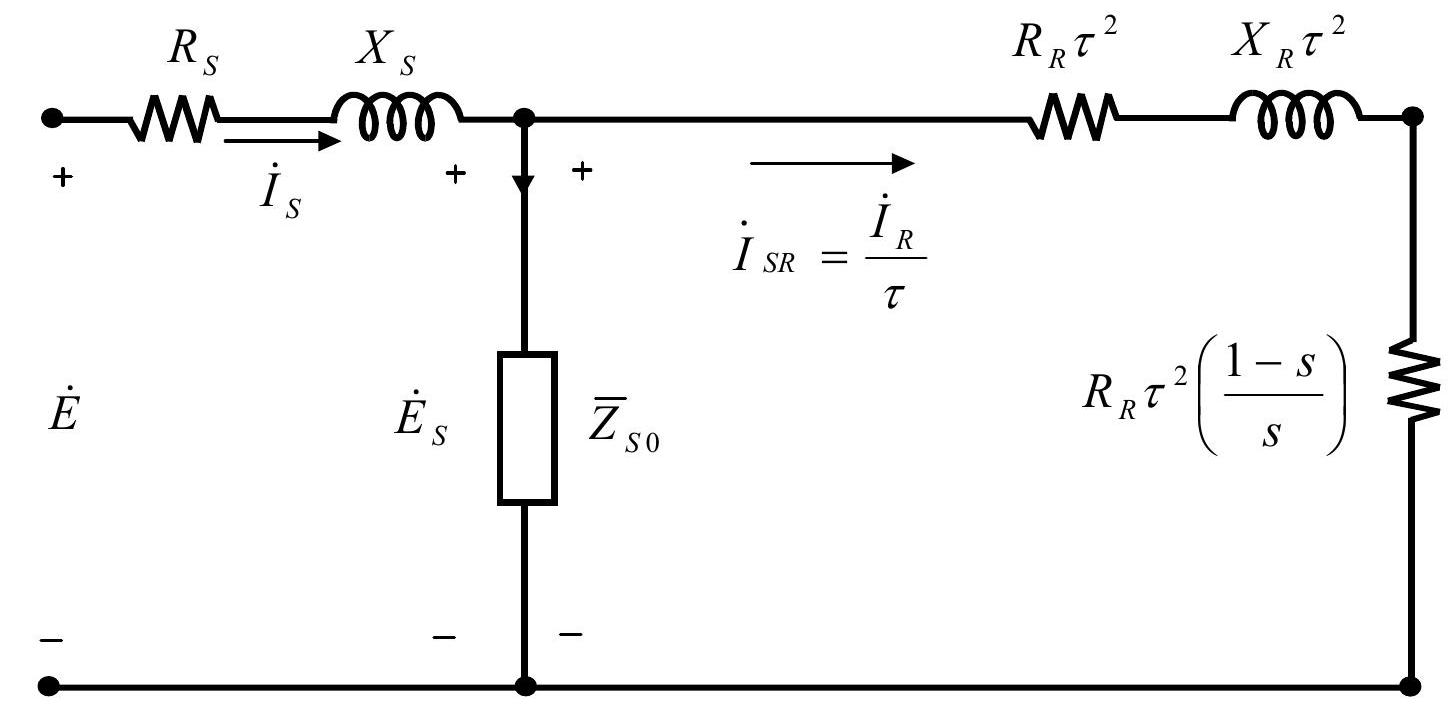
La [[Potenza nei sistemi trifase|potenza trifase]] meccanica *(quindi attiva)* $P$ trasmessa al carico è legata alla resistenza fittizia ($R_c$) dipendente dallo scorrimento $s$
$P_c = 3R_c I_{SR}^2=3 \tau^2 R_R \left(\frac{1-s}{s}\right) I_{SR}^2$
con $R_c = \tau^2 R_R (\frac{1-s}{s})$.
La corrente che attraversa la resistenza fittizia, per il [[Bipoli equivalenti|principio di equivalenza]] ($\dot{\mathrm{V}}=\overline {\mathrm{Z}}_{eq}\dot I$), ed essendo $|\overline Z_{eq}| = \sqrt{R_{eq}^2 + X_{eq}^2}$ è data da:
$I_{S R}=\frac{E_S}{\sqrt{\left(\frac{\tau^2 R_R}{s}\right)^2+\left(\tau^2 X_R\right)^2}}$
Sostituendo l'espressione della corrente $I_{SR}$ ricavata dal circuito, si ottiene la potenza in funzione dei parametri della macchina.
Sappiamo poi che la potenza meccanica è il prodotto tra la coppia $C$ e la velocità angolare del rotore ($P=C \omega_{m}$), ed essendo
$\omega_m = \frac{\omega}{p}(1-s)$
con $p$ numero di coppie polari e $\omega$ la pulsazione, abbiamo tutti i termini per ricavarci l'espressione della **coppia elettromagnetica** da:
$C=\frac{3pR_c I_{SR}^2}{\omega(1-s)}$
#### Coppia in funzione dello scorrimento
Sostituendo i valori di $R_c$ e $I_{S R}$ precedentemente trovati a questa equazione si ottiene l'espressione della **coppia meccanica prodotta da una macchina asincrona in funzione dello scorrimento**, nel caso di rotore avvolto ($C_{Ra}$)
$\color {green} C_{Ra}=\frac{3 p R_R}{\omega \tau^2} \frac{E_S^2}{\frac{R_R^2}{s}+s X_R^2}$
Questa, facendo riferimento al circuito equivalente del rotore a gabbia, può essere adattata per trovare la rispettiva coppia ($C_{Rg}$)
$\color {green} C_{Rg}=\frac{\frac{n_b}{2} p R_G}{\omega K_{a S}^2 N_S^2} \frac{E_S^2}{\frac{R_G^2}{s}+s X_G^2}$
==Tracciando l'andamento della coppia in funzione dello scorrimento $s$, si ottiene la **caratteristica meccanica della macchina.**==
![[Pasted image 20260303120858.png]]
Dall'analisi matematica della funzione $C(s)$ emergono due punti di particolare interesse:
- **Coppia massima:** Si verifica annullando la derivata prima della funzione rispetto a $s$. Lo scorrimento critico $\hat{s}$ in cui si ha il picco di coppia e il valore della coppia massima sono: $\hat{s} = \frac{R_R}{X_R} \quad \implies \quad C_{max} = \frac{3 p}{2 \omega \tau^2} \frac{E_S^2}{X_R}$
- **Coppia di spunto (avviamento):** È la coppia erogata all'istante di accensione, quando il rotore è ancora fermo ($s = 1$): $C_{spunto} = \frac{3 p R_R}{\omega \tau^2} \frac{E_S^2}{R_R^2 + X_R^2}$
#### Coppia in funzione della velocità di rotazione
Poiché lo [[Macchina asincrona|scorrimento]] è legato alla velocità di rotazione di rotore $n_m$ dalla relazione
$s = \frac{n_s - n_m}{n_s}$
==la curva (**caratteristica meccanica**) può essere tracciata anche in funzione della velocità di rotazione (espressa in giri al minuto).==
$ \left\{\begin{array}{l}
C_{Ra}=\frac{3 p R_R}{\omega \tau^2} \frac{E_S^2}{\frac{R_R^2}{s}+s X_R^2} \\
\mathrm{~s}=\frac{n_S-n_m}{n_s}
\end{array}\right. $
![[Pasted image 20250922110529.png]]
All'avviamento ($n_m = 0$), la macchina eroga la coppia di spunto.
Accelerando, la coppia cresce fino a raggiungere il valore massimo, per poi decrescere rapidamente e annullarsi in corrispondenza della velocità di sincronismo ($n_m = n_s$).
### Stabilità del punto di funzionamento
Il punto di funzionamento a regime di un motore asincrono è determinato dall'intersezione tra la curva della coppia motrice $C$ e la curva della coppia resistente $C_r$ imposta dal carico meccanico.
![[Pasted image 20250922110604.png]]
Analizzando il grafico:
- **Punto $F_1$ (Stabile):** Se una perturbazione fa diminuire la velocità, la coppia motrice diventa maggiore di quella resistente, facendo accelerare il rotore e riportandolo in $F_1$.
- **Punto $F_2$ (Instabile):** Se la velocità diminuisce, la coppia motrice diventa inferiore a quella resistente, causando un ulteriore rallentamento fino all'arresto del motore.
- **Punto $F_3$:** Rappresenta un caso in cui la coppia resistente $C_{2r}$ è troppo elevata all'avviamento. Il motore non riesce a superare lo spunto e si blocca.
### Tecniche per massimizzare la coppia
Esistono delle le tecniche per massimizzare la coppia nelle macchine sincrone e ottimizzare la curva in funzione dello scorrimento.
Le principali tecniche sono 3:
1) **Uso del reostato di avviamento**
- Applicabile solo nel [[Macchina asincrona|caso di rotore avvolto]]
- Inserisce resistenze aggiuntive $R_a$ in serie al rotore
- Questo sposta lo scorrimento critico ($\hat{s} \cong \frac{R_R + R_a}{X_R}$) permettendo di ottenere la coppia massima esattamente allo spunto ($s=1$)
- Le resistenze vengono poi progressivamente escluse tramite teleruttori all'aumentare della velocità.
2) **Rotore a doppia gabbia**
- Specifica per motori con [[Macchina asincrona|rotore a gabbia]]
- Permette di aumentare la coppia allo spunto e ridurre le correnti di avviamento
- Sfrutta due gabbie coassiali
- All'avviamento ($s \approx 1$), la corrente si concentra nella gabbia esterna (alta resistenza, bassa reattanza), garantendo un'elevata coppia di spunto
- In prossimità del sincronismo ($s \approx 0$), la corrente passa nella gabbia interna (bassa resistenza), ottimizzando il rendimento a regime.
3) **Avviamento stella - triangolo**
- Applicabile per entrambi i rotori
- Questa tecnica mitiga gli effetti indesiderati delle extracorrenti di avviamento dei motori
- Agisce sugli avvolgimenti di statore, sfruttando le proprietà del passaggio di connessione stella-triangolo
- Partendo con un collegamento a stella, si riduce di un terzo la corrente di spunto ($I_{lY} = I_{lD}/3$), mitigando le extracorrenti, ma riducendo proporzionalmente anche la coppia.
- Superato il transitorio, si commuta a triangolo per erogare le prestazioni nominali.
*Si rimanda alle fonti per un maggiore approfondimento.*
##### Domande di teoria
**Rispondere alle seguenti domande specifiche:**
- [ ] Caratteristica meccanica di un motore asincrono trifase.
- In funzione dello scorrimento
- In funzione della velocità di rotazione
- [ ] Quali sono le tecniche per massimizzare la coppia meccanica e che effetto hanno sulla caratteristica meccanica? Disegnane il circuito fondamentale in ogni caso
*Consultare le risorse selezionate in fondo alla nota per soluzioni e approfondimenti.*
---
> [!info]- Resources
> ![[!Elettrotecnica#Risorse#Bibliografia]]
> ![[!Elettrotecnica#Risorse#Approfondimenti]]