Il **circuito equivalente** della [[Macchina asincrona|macchina asincrona]] descrive, per fase, il comportamento elettrico reale della macchina includendo resistenze, reattanze di dispersione, magnetizzazione e perdite nel ferro.
È formalmente analogo alla [[Rete equivalente del trasformatore|rete equivalente del trasformatore]], ma introduce la dipendenza dallo **scorrimento** $s$ nel ramo rotorico.
Nel funzionamento a corrente alternata, statore e rotore sono accoppiati magneticamente tramite il flusso nel traferro: lo statore si comporta come “primario” e il rotore come “secondario”. A differenza del trasformatore, però, la frequenza (pulsazione) delle grandezze rotoriche varia con lo scorrimento, e questo richiede una manipolazione del modello per ottenere una rete **isofrequenziale** (tutta alla stessa $\omega$).
### Rete equivalente a vuoto
Nel [[Macchina asincrona trifase|funzionamento a vuoto]] è applicata una tensione di fase statorica $\dot{E}$, mentre gli avvolgimenti di rotore sono **aperti** (nessuna corrente rotorica significativa).
Si ricava la rete in figura:
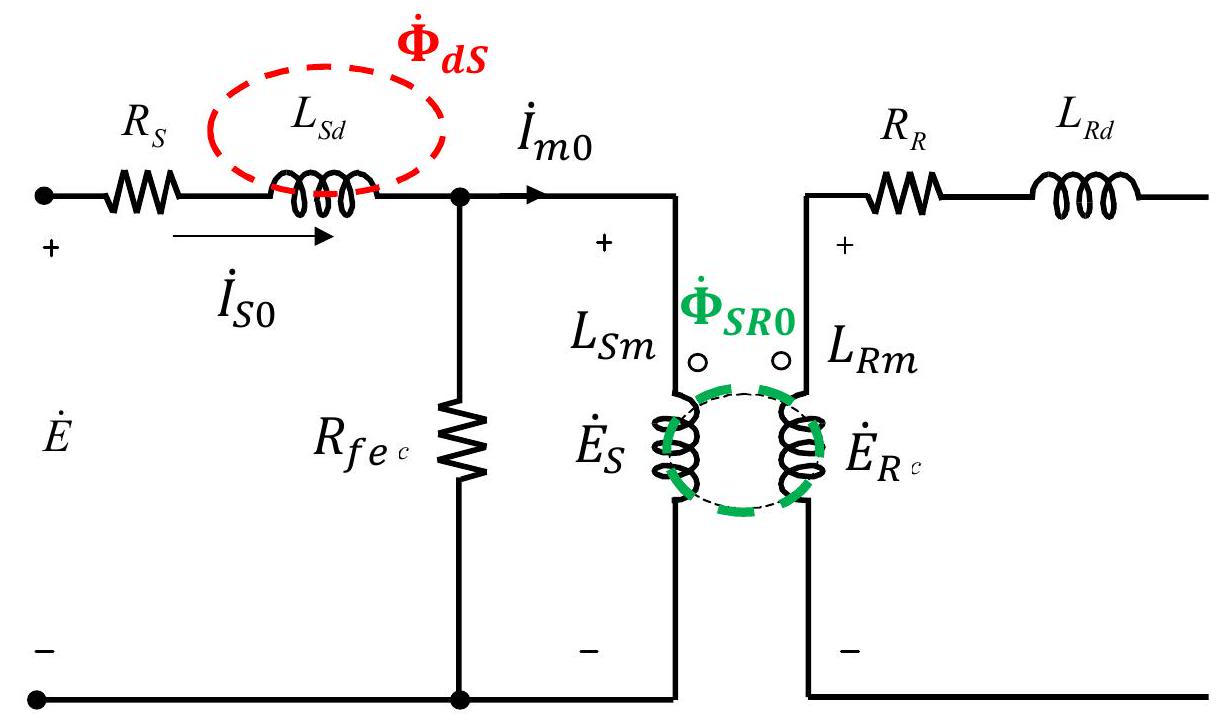
dove, nell'immagine:
$\mathbf{E}=$ tensione applicata all'avvolgimento di statore
$\mathbf{E}_{\mathbf{S}}=$ tensione presente sull'accoppiamento perfetto
$\mathbf{I}_{\mathbf{S} \mathbf{0}}=$ corrente assorbita dall'avvolgimento di statore
$\mathbf{R}_{\mathbf{S}}=$ resistenza del filo (in rame) che costituisce l'avvolgimento di statore
$\mathbf{L}_{\mathbf{d s}}=$ induttanza di dispersione dell'avvolgimento di statore
$\mathbf{L}_{\mathbf{s m}}=$ induttanza di magnetizzazione
dell'avvolgimento di statore
$\mathbf{R}_{\mathrm{fe}}=$ resistenza che tiene conto delle perdite di potenza per isteresi e correnti parassite nel nucleo ferromagnetico
$\mathbf{L}_{\mathbf{R m}}=$ induttanza di magnetizzazione dell'avvolgimento di rotore
$\mathbf{E}_{\mathbf{R}}=$ tensione indotta sull'avvolgimento di rotore
$\tau=\frac{E}{E_{R 0}}=$ rapporto di trasformazione tra statore e rotore
### Rete equivalente in corto circuito (con rotore bloccato)
Nel [[Macchina asincrona trifase|funzionamento in corto circuito]] il rotore è **bloccato** meccanicamente ed elettricamente in **cortocircuito**.
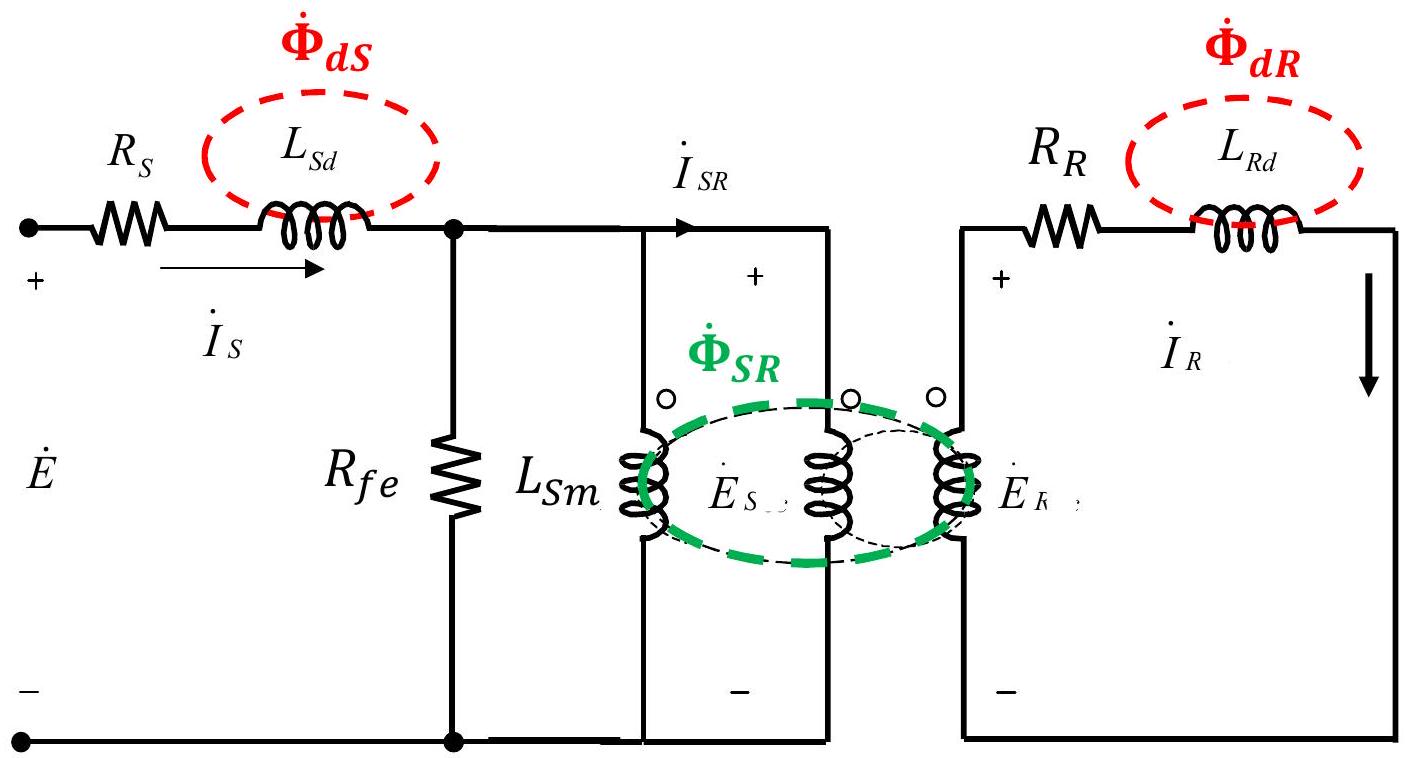
In questa condizione $s \approx 1$, quindi la pulsazione rotorica coincide (in pratica) con quella statorica.
#### Rotore avvolto
Per il caso di [[Macchina asincrona|rotore avvolto]], imponendo le [[Leggi di Kirchhoff|equazioni di maglia]]:
$
\begin{cases}
\dot{E}=(R_S+j\omega L_{Sd})\dot{I}_S+\dot{E}_S\\
\dot{E}_R=(R_R+j\omega L_{Rd})\dot{I}_R
\end{cases}
$
essendo le f.e.m. legate al flusso concatenato:
$
\begin{cases}
\dot{E}_S=j\omega N_S K_{aS}\dot{\phi}_{SR}\\
\dot{E}_R=j\omega N_R K_{aR}\dot{\phi}_{SR}
\end{cases}
$
Possiamo imporre l'equivalenza per ottenere il **rapporto di trasformazione**:
$ \color {green}
\tau \cong \frac{E_S}{E_R}=\frac{I_R}{I_{SR}}= \frac{N_SK_{aS}}{N_RK_{aR}},
$
dove $I_{SR}$ è la componente statorica associata al flusso nel traferro.
#### Rotore a gabbia
Nel caso di [[Macchina sincrona|rotore a gabbia]], l’idea è analoga ma il “secondario” è costituito da barre (numero $n_b$), e il numero di “fasi equivalenti” può essere assunto pari a $n_b/2$ (accoppiamento distribuito).
$\quad\left\{\begin{array}{l}\dot{E}=\left(R_{S}+j \omega L_{S d}\right) \dot{I}_{S}+\dot{E}_{S} \\ \dot{E}_{G}=\left(R_{G}+j \omega L_{G d}\right) \dot{I}_{G}\end{array} \quad\left\{\begin{array}{l}\dot{E}_{S}=\mathrm{j} \omega N_{S} K_{a S} \dot{\phi_{S G}} \\ \dot{E}_{G}=\mathrm{j} \omega \dot{\phi_{S G}}\end{array} \Longrightarrow\left\{\begin{array}{l}\tau \cong \frac{E_{S}}{E_{G}}=\frac{N_{S} K_{a S}}{1} \\ \tau \cong \frac{I_{G}}{I_{S G}}=\frac{N_{S} K_{a S}}{1}\end{array}\right.\right.\right.$
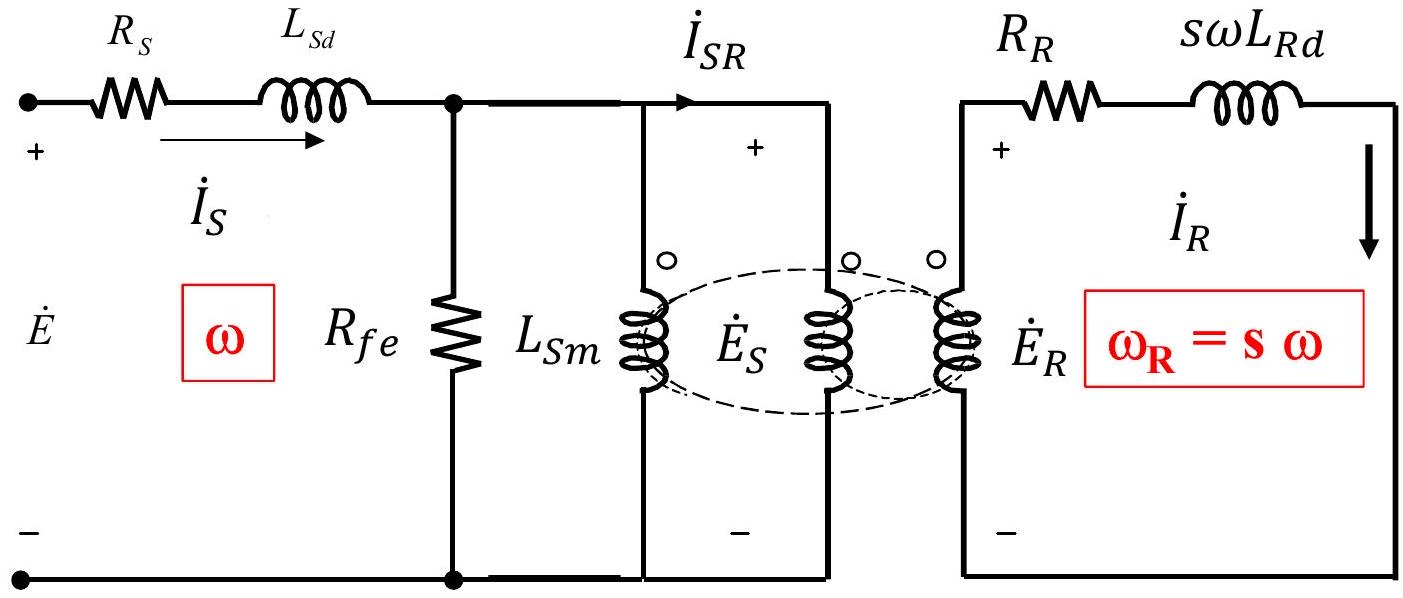
### Rete equivalente a carico (con rotore libero di ruotare)
Nel [[Macchina asincrona trifase|funzionamento a carico]] il rotore è **libero di ruotare** e resta cortocircuitato.
In questo caso abbiamo:
- lato statore: pulsazione $\omega$
- lato rotore: pulsazione $\omega_R=s\omega$
Dalle f.e.m. indotte:
$
\begin{cases}
\dot{E}_S=j\omega N_SK_{aS}\dot{\phi}_{SR}\\
\dot{E}_R=js\omega N_RK_{aR}\dot{\phi}_{SR}
\end{cases}
\Rightarrow
\begin{cases}
\frac{E_S}{E_R}=\frac{N_SK_{aS}}{N_RK_{aR}}\frac{1}{s}=\frac{\tau}{s}\\
\frac{I_{SR}}{I_R}=\frac{s}{\tau}
\end{cases}
$
Per rendere la rete **isofrequenziale** (tutta a $\omega$), si riscrive l’equazione rotorica imponendo:
$
\dot{E}_R=(R_R+js\omega L_{Rd})\dot{I}_R
$
e sostituendo $\dot{E}_R=\dfrac{s}{\tau}\dot{E}_S$ (equivalenza di trasformazione):
$
\frac{s\dot{E}_S}{\tau}=(R_R+js\omega L_{Rd})\dot{I}_R
$
Dividendo per $s$:
$
\frac{\dot{E}_S}{\tau}=\left(\frac{R_R}{s}+j\omega L_{Rd}\right)\dot{I}_R
$
che viene tipicamente riscritto come:
$
\frac{\dot{E}_S}{\tau}=\left(R_R+\left(\frac{1-s}{s}\right)R_R+j\omega L_{Rd}\right)\dot{I}_R
$
==In questo modo omega a sinistra e a destra è la stessa e quindi **la rete è stata resa isofrequenziale**. L’interpretazione fisica è importante:==
- $R_R$ rappresenta le **perdite Joule rotoriche**
- $\left(\frac{1-s}{s}\right)R_R$ rappresenta la **potenza convertita** in meccanica (carico equivalente)
Rete isofrequenziale riportata a statore:
![[Pasted image 20250922105210.png]]
Nel **caso di rotore a gabbia,** invece si ottiene:
![[Pasted image 20260303120319.png]]
#### Bilanci di potenza
Se consideriamo il **caso di rotore avvolto**, si possono dimostrare le seguenti relazioni per la potenza:
- $P_{\text {avvs }}=3 R_{S} I_{S}^{2}=$ potenza dissipata per effetto joule negli avvolgimenti statorici
- $P_{f e}=3 \frac{E_{s}^{2}}{R_{f e}}=$ potenza dissipata per isteresi magnetica e correnti parssite nel nucleo ferromagnetico
- $P_{\text {avvR }}=3 R_{R} I_{R}^{2}=$ potenza dissipata per effetto joule negli avvolgimenti rotorici
- $P=3 R_{R}\left(\frac{1-s}{s}\right) I_{R}^{2}=$ potenza trasferita al carico meccanico
Nel **caso di rotore a gabbia,** invece abbiamo:
- $P_{\text {avvs }}=3 R_{S} I_{S}^{2}=$ potenza dissipata per effetto joule negli avvolgimenti statorici
- $P_{f e}=3 \frac{E_{S}^{2}}{R_{f e}}=$ potenza dissipata per isteresi magnetica e correnti parssite nel nucleo ferromagnetico
- $P_{\text {avvR }}=\frac{n_{b}}{2} R_{G} I_{G}^{2}=$ potenza dissipata per effetto joule nelle barre rotoriche
- $P=\frac{n_{b}}{2} R_{G}\left(\frac{1-s}{s}\right) I_{G}^{2}=$ potenza trasferita al carico meccanico
#### Rete equivalente riportata a statore
Dalla relazione
$\frac{\dot{E}_S}{\tau}=\left(R_R+\left(\frac{1-s}{s}\right) R_R+j \omega L_{R d}\right) \dot{I}_R$
ed essendo $\dot{I}_{R}=\tau \dot{I}_{SR}$ si ottiene
$\dot{E}_S=\left(\tau^2 R_R+\left(\frac{1-s}{s}\right) \tau^2 R_R+j \tau^2 \omega L_{R d}\right) \dot{I}_{S R}$
==Per cui la rete equivalente della macchina sincrona con il rotore riportata a statore è la seguente.==
| Rotore avvolto | Rotore a gabbia |
| ------------------------------------------------------------------------------------------------------------------------------------------------ | --------------------------------------------------------------------------------------------------------------------------------- |
| 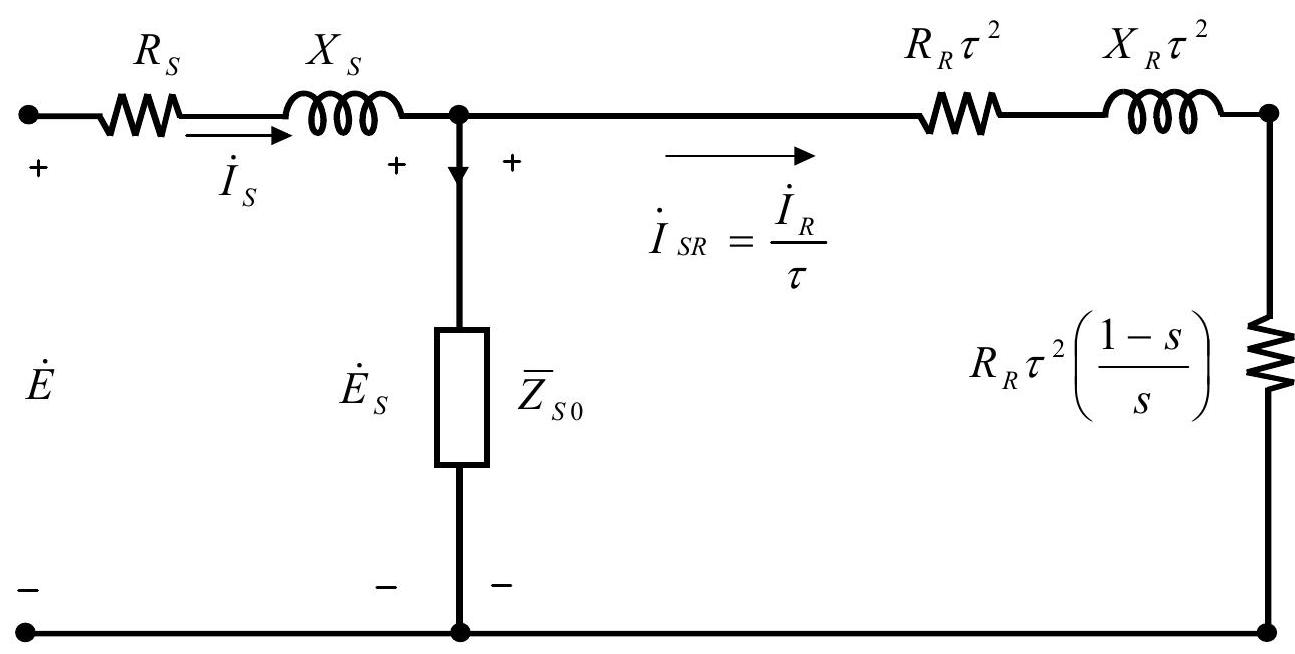 | 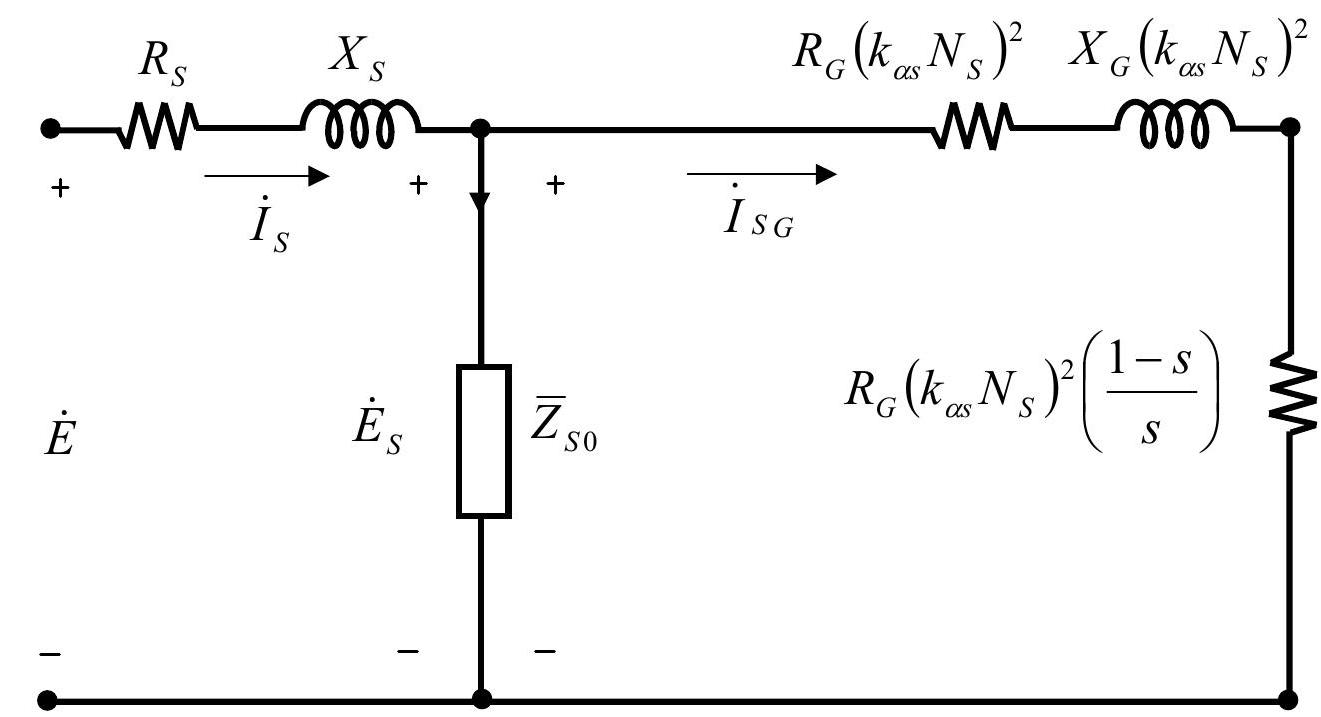 |
#### Rete equivalente semplificata
Nel caso (tipico) in cui $I_S \cong I_{SR}$, il ramo con la resistenza e reattanza statoriche può essere portato nella maglia destra della rete equivalente, in serie con la resistenza e reattanza di rotore.
Attraverso questa approssimazione di calcolo si ottiene la **rete equivalente semplificata** in figura:
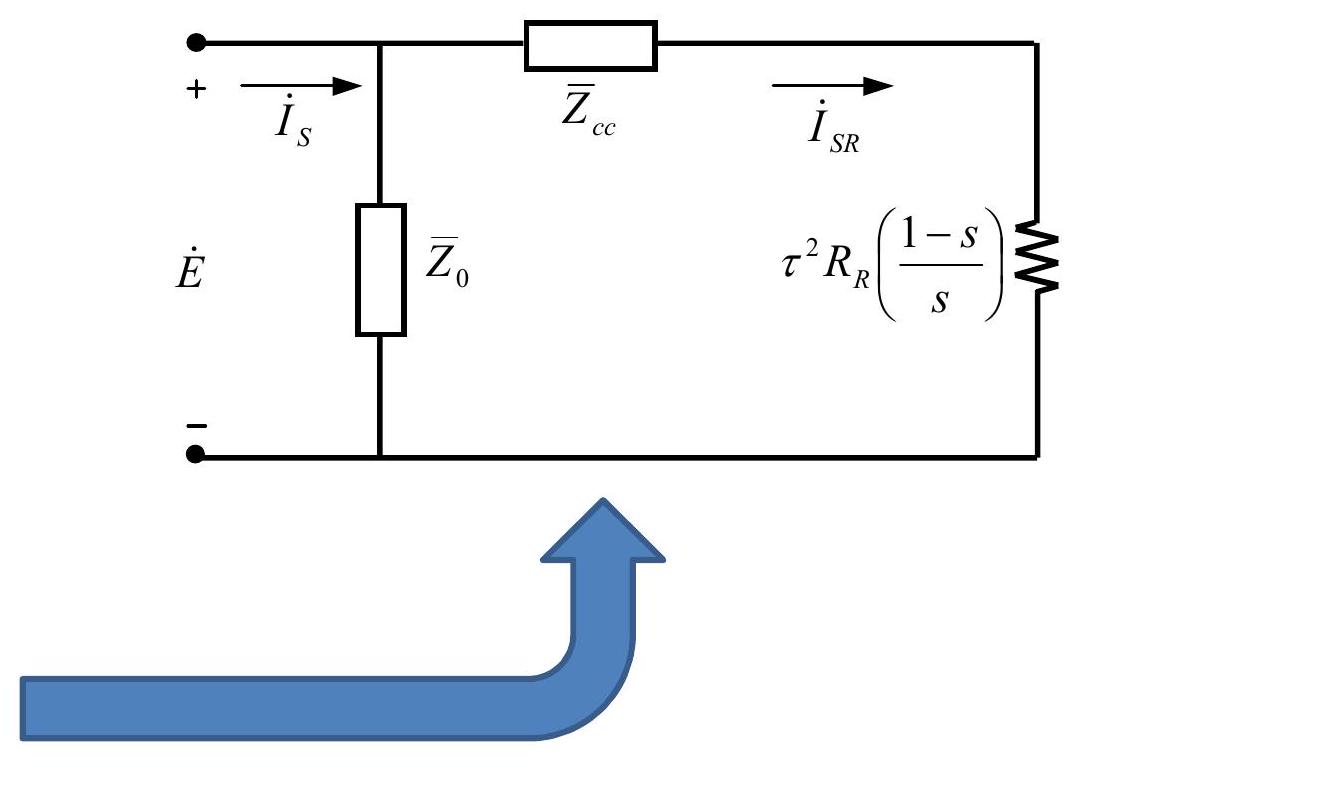
dove le [[Impedenza e ammettenza|impedenze]] $\bar Z_0$ e $\bar Z_{cc}$ sono misurabili attraverso le [[Prove sulla macchina asincrona|prove a vuoto e in corto circuito]].
$
\left\{\begin{array}{l}
\bar{Z}_{0}=R_{f e} \| j \omega L_{1 m} \\
\bar{Z}_{c c}=\left(R_{S}+\tau^{2} R_{R}\right)+j\left(X_{S}+\tau^{2} X_{R}\right)
\end{array}\right.
$
##### Domande di teoria
**Rispondere alle seguenti domande specifiche:**
- [ ] Disegna le reti equivalenti nelle varie condizioni di carico ed esplicita i parametri principali
- [ ] Ricava il circuito equivalente semplificato della macchina asincrona ed esplicitane i parametri principali
*Consultare le risorse selezionate in fondo alla nota per soluzioni e approfondimenti.*
---
> [!info]- Resources
> ![[!Elettrotecnica#Risorse#Bibliografia]]
> ![[!Elettrotecnica#Risorse#Approfondimenti]]