La [[Macchina sincrona|macchina sincrona]] opera **su rete a tensione e frequenza prevalenti** quando è connessa a un sistema elettrico “rigido” (presenza di altri generatori) che **impone** valore efficace della tensione e frequenza. In tale condizione la macchina regola principalmente **potenza attiva** (tramite coppia meccanica) e **potenza reattiva** (tramite eccitazione).
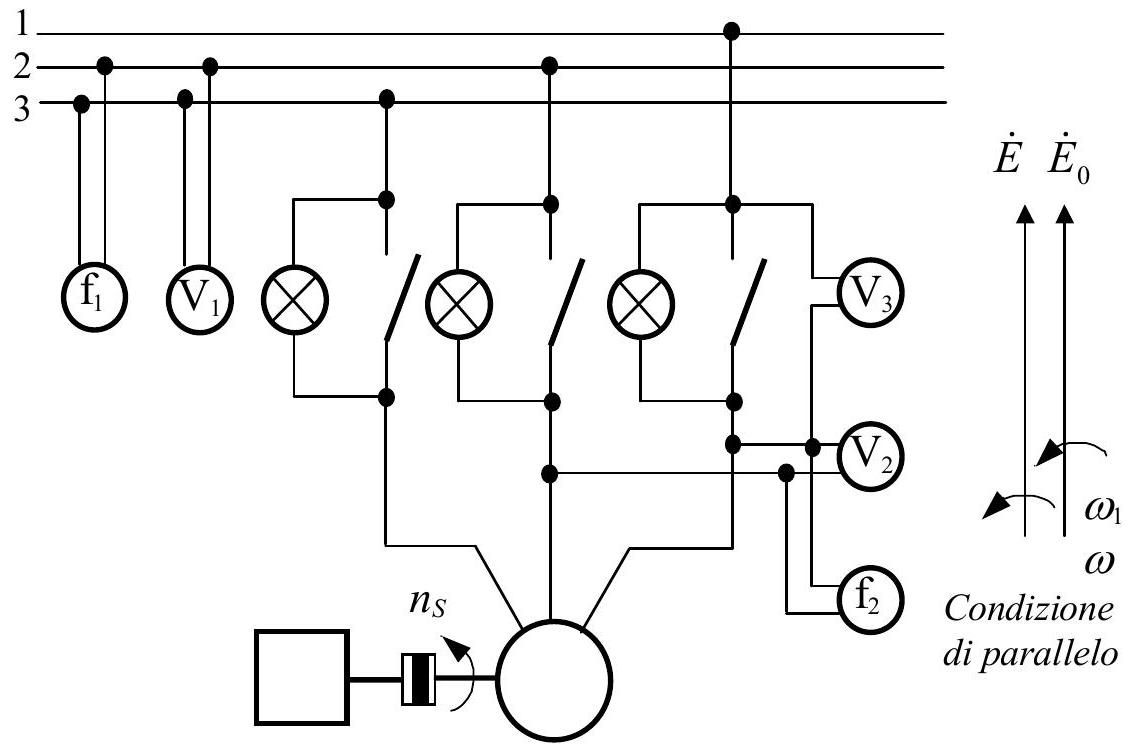
#### Messa in parallelo (sincronizzazione)
Il collegamento alla rete deve avvenire quando, per ciascuna fase, la tensione della macchina e quella di rete sono:
- uguali in modulo (tensione)
- uguali in frequenza
- allineate in fase (sfasamento nullo)
- con la stessa sequenza di fase (in trifase)
In pratica si usa un sincronoscopio: agendo su **eccitazione** (modulo della f.e.m.) e su **coppia motrice** (frequenza/angolo) si porta la macchina in condizioni di sincronismo; quando l’allineamento è raggiunto, i segnalatori luminosi indicano l’istante idoneo alla chiusura dell’interruttore.
Subito dopo la messa in parallelo, se la coppia motrice è solo quella necessaria a vincere gli attriti, la macchina **non scambia potenza attiva** significativa: la rete “blocca” tensione e frequenza, mentre la potenza meccanica copre prevalentemente le perdite.
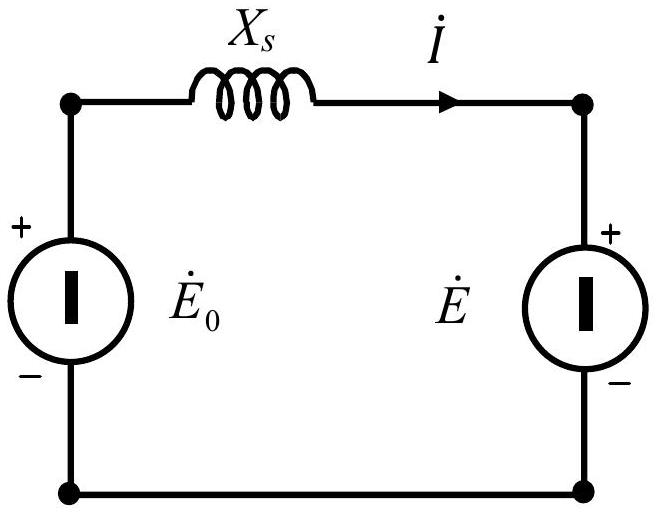
Per lo studio in regime sinusoidale si usa la rappresentazione a [[Fasori|fasori]] e il circuito equivalente per fase.
### Funzionamento da generatore
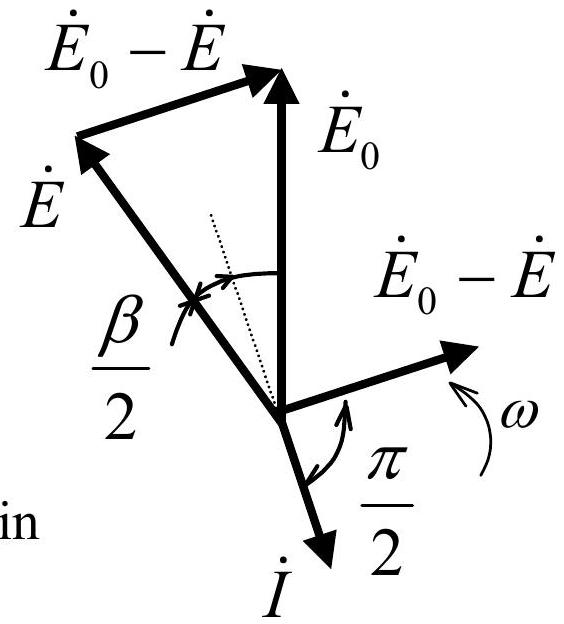
Dall’equazione di maglia (applicazione delle [[Leggi di Kirchhoff|leggi di Kirchhoff]]) si ottiene il diagramma fasoriale:
![[Pasted image 20250919153209.png]]
Le relazioni fondamentali (trascurando la resistenza di armatura) sono:
$
\begin{cases}
\dot{I}=\dfrac{\dot{E}_0-\dot{E}}{jX_s}\\
\left|\dot{E}_0-\dot{E}\right|=2E_0\sin \dfrac{\beta}{2}
\end{cases}
$
dove:
- $\dot{E}$ è la tensione di rete (riferimento),
- $\dot{E}_0$ è la f.e.m. interna (legata all’eccitazione),
- $X_s$ è la reattanza sincrona,
- $\beta$ è l’angolo di carico (sfasamento tra $\dot{E}_0$ e $\dot{E}$).
#### Erogazione di potenza attiva
Aumentando la coppia motrice, il rotore tende ad “anticipare” e cresce $\beta>0$: la macchina eroga corrente verso la rete e quindi potenza attiva.
La potenza complessiva trifase può essere ricavata come:
$
P=3E_0I\cos \frac{\beta}{2}
$
Combinando con la relazione geometrica si ottiene la caratteristica potenza–angolo:
$
P=\frac{3E^2}{X_s}\sin \beta
$
Da questa relazione è evidente che la potenza cresce con $\beta$ fino a $\beta=\frac{\pi}{2}$; oltre tale valore, pur aumentando $\beta$, la potenza diminuirebbe.
Ne segue che:
- per $0 \le \beta \le \frac{\pi}{2}$ l’equilibro è **stabile**: all'aumentare della coppia motrice, la macchina risponde con una coppia elettromagnetica resistente uguale e contraria.
- per $\beta>\frac{\pi}{2}$ l’equilibrio diventa **instabile**: un aumento della coppia motrice riduce la coppia resistente, portando alla condizione di "rotore in fuga" e alla perdita del sincronismo.
La condizione di funzionamento stabile da generatore è quindi:
$ \color {green}
0 \le \beta \le \frac{\pi}{2}
$
### Funzionamento da motore
Se si riduce/annulla la coppia del motore primo, $\dot{E}_0$ passa **in ritardo** rispetto a $\dot{E}$, quindi $\beta<0$. In tale situazione la potenza attiva cambia segno: la macchina **assorbe** energia elettrica dalla rete e la converte in potenza meccanica all’albero (coppia elettromagnetica motrice).
La relazione potenza–angolo resta formalmente la stessa:
$
P=\frac{3E^2}{X_s}\sin \beta
$
Questa volta però
- per $-\frac{\pi}{2} \le \beta \le 0$ il funzionamento è **stabile**: l’aumento della coppia resistente del carico è bilanciato dall’aumento della coppia elettromagnetica motrice (stabile)
- per $\beta<-\frac{\pi}{2}$ la coppia elettromagnetica motrice diminuisce: la macchina rallenta fino al possibile **arresto del rotore**
La condizione di funzionamento stabile da motore è quindi:
$\color {green}
-\frac{\pi}{2} \le \beta \le 0
$
### Funzionamento da compensatore sincrono
Partendo dalla messa in parallelo con $\dot{E}_0 \equiv \dot{E}$, mantenendo la coppia motrice circa costante (solo perdite) e variando l’eccitazione, la macchina **scambia prevalentemente potenza reattiva con la rete** (potenza attiva circa nulla).
- Se $\dot{E}_0>\dot{E}$ (sovra-eccitazione) la macchina **eroga** potenza reattiva alla rete (comportamento equivalente a carico induttivo visto dalla rete)
![[Pasted image 20250919153837.png]]
- Se $\dot{E}_0<\dot{E}$ (sotto-eccitazione) la macchina **assorbe** potenza reattiva dalla rete (comportamento equivalente a carico capacitivo)
![[Pasted image 20250919153913.png]]
*Questa modalità è usata per regolare i flussi di reattiva e, quindi, i profili di tensione in rete.*
### Diagramma polare
Il **diagramma polare** riassume il comportamento al variare di $\beta$ e dell’eccitazione.
Assumendo $\dot{E}$ come riferimento sull’asse orizzontale, per un dato valore di eccitazione, $\dot{E}_0$ ha modulo (circa) costante e “ruota” al variare della coppia applicata.
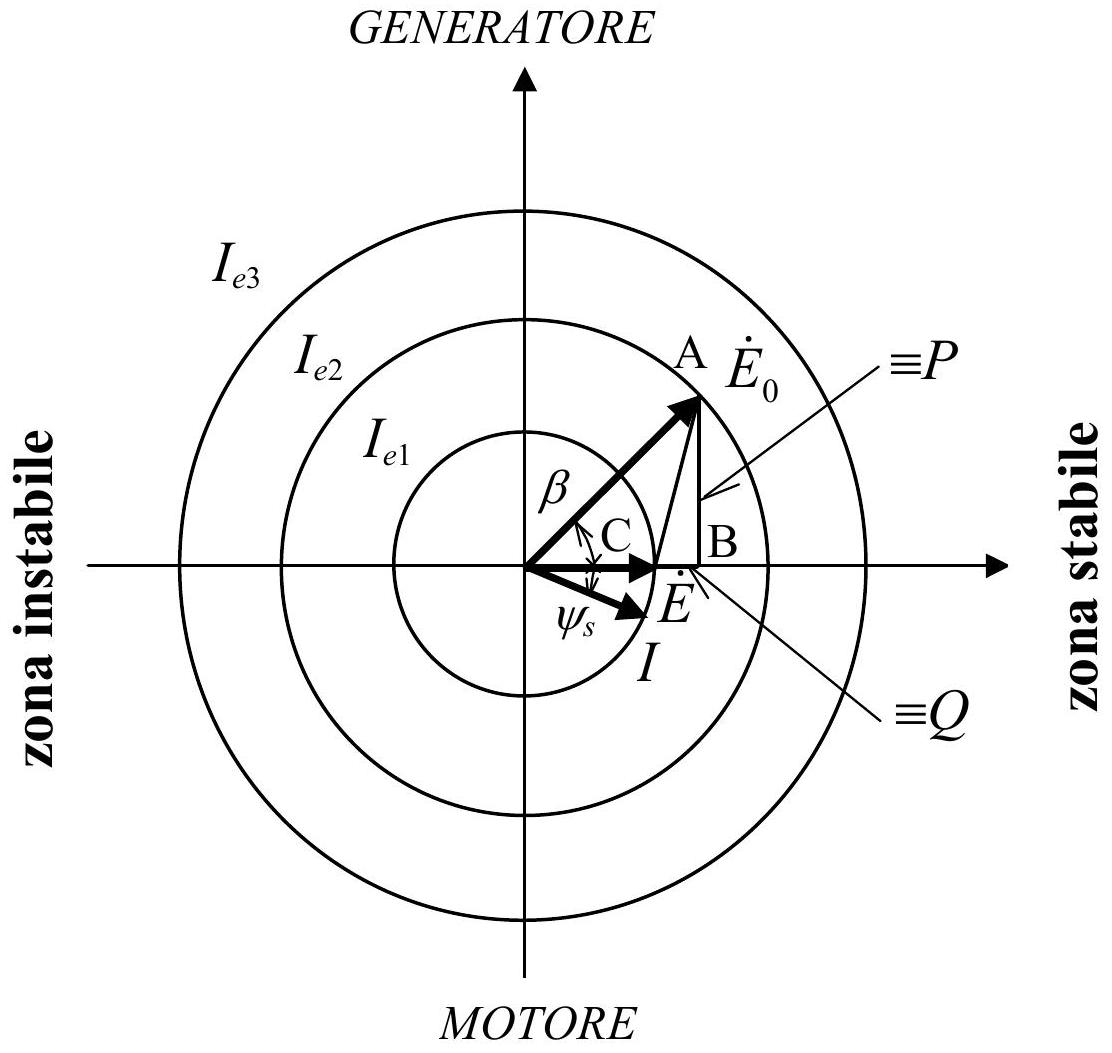
Zone operative (in termini di angolo):
- motore: $-\pi \le \beta \le 0$
- generatore: $0 \le \beta \le \pi$
- stabile: $-\frac{\pi}{2} \le \beta \le \frac{\pi}{2}$
- instabile: $\frac{\pi}{2} \le \beta \le \frac{3\pi}{2}$
#### Curve a “V"
Le **Curve a V** *(o curve di Mordey)* descrivono invece la relazione tra la corrente di armatura e la corrente di eccitazione per diversi livelli di potenza attiva.
A [[Potenza nei sistemi trifase|potenza attiva trifase]] assegnata, vale:
$
P=3EI\cos \psi
$
isolando il termine di corrente moltiplicato per il fattore di potenza, si ottiene
$
\begin{cases}
I \cos \psi=\dfrac{P}{3E}\\
I \sin \psi= \pm \sqrt{I^2-\dfrac{P^2}{9E^2}}
\end{cases}
$
*dove per ricavare la seconda equazione si è fatto uso della [[Formule trigonometriche|formula trigonometrica]] per la somma dei quadrati.*
Prendendo dal [[Alternatore - Macchina sincrona in isola|diagramma fasoriale generico]], la [[Alternatore - Macchina sincrona in isola#Caratteristica Esterna|relazione della caratteristica esterna]]
$
E_{0}^{2}=E^{2}+X_{s}^{2} I^{2}+2EX_{s}I\sin \psi_{s}
$
e sostituendo il valore ottenuto per $I\sin \psi_{s}$ si arriva alla relazione:
$ \color {green}
E_0=\sqrt{E^2+X_s^2I^2 \pm 2EX_s\sqrt{I^2-\frac{P^2}{9E^2}}}
$
Variando $I$ (a $P$ costante) si trovano due possibili valori di $E_0$ e quindi due valori della corrente di eccitazione $I_e$. Riportandoli nel piano $(I, I_e)$ si generano le **curve a V**.
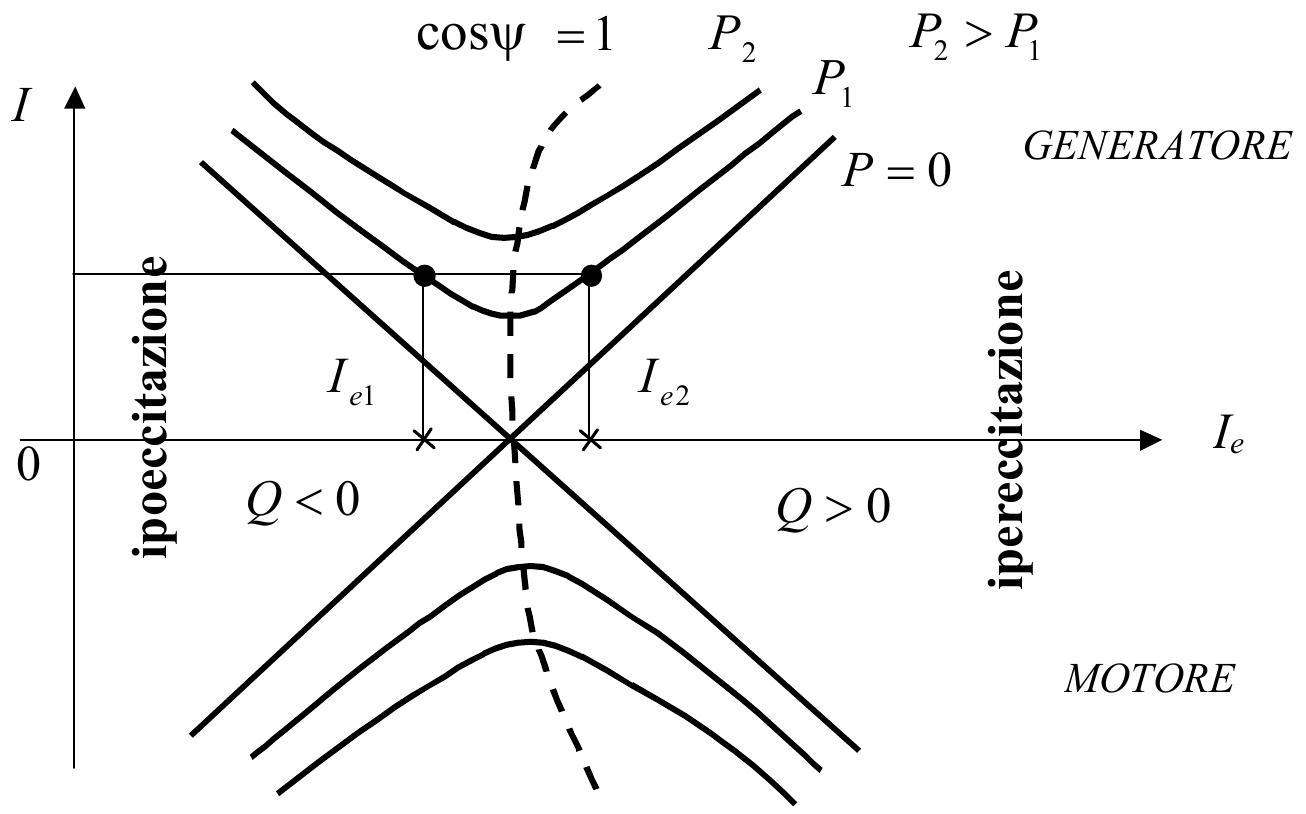
I vertici delle curve a V corrispondono a $\cos \psi=1$ (fattore di potenza unitario), cioè alla condizione $P=3EI$, dove la macchina scambia solo potenza attiva.
##### Domande di teoria
**Rispondere alle seguenti domande specifiche:**
- [ ] Disegna la rete equivalente
- [ ] Quali sono le varie condizioni di funzionamento della macchina?
- [ ] Cosa è il diagramma polare? Disegnalo e dimostra le varie condizioni di funzionamento per l'angolo beta
- [ ] Cosa sono e come si ricavano le curve a V?
*Consultare le risorse selezionate in fondo alla nota per soluzioni e approfondimenti.*
---
> [!info]- Resources
> ![[!Elettrotecnica#Risorse#Bibliografia]]
> ![[!Elettrotecnica#Risorse#Approfondimenti]]